Classic Control
All of the environments in classic control borrow from Gymnasium.
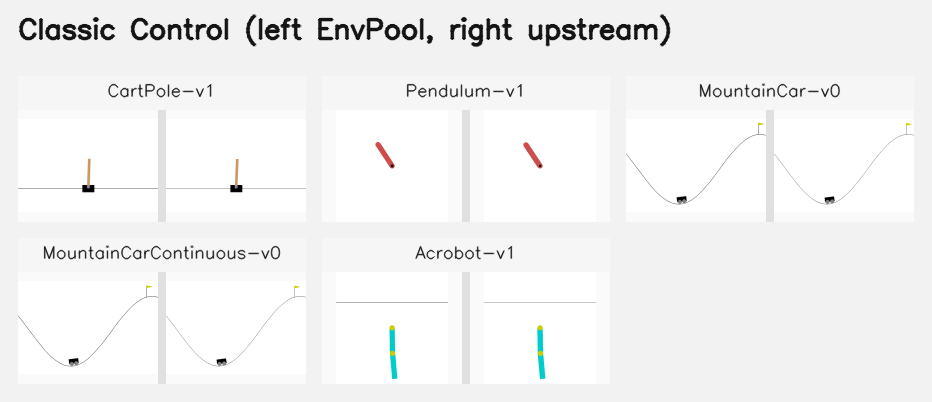
Render Compare
Representative first-frame compares for classic control tasks that support rendering. In each panel, EnvPool is on the left and the Gymnasium reference renderer is on the right.
CartPole-v0/1
Namespace aliases phys2d/CartPole-v0 and phys2d/CartPole-v1 are also
available.
gymnasium cartpole source code
A pole is attached by an un-actuated joint to a cart, which moves along a frictionless track. The pendulum starts upright, and the goal is to prevent it from falling over by increasing and reducing the cart’s velocity.
The difference between CartPole-v0 and CartPole-v1 is that the former
has max_episode_steps 200 with 195 reward threshold, while the latter has
max_episode_steps 500 with 475 reward threshold.
Pendulum-v0, Pendulum-v1
The namespace alias phys2d/Pendulum-v0 is also available for Pendulum-v0.
gymnasium pendulum source code
The inverted pendulum swing-up problem is a classic problem in the control literature. In this version of the problem, the pendulum starts in a random position, and the goal is to swing it up to stay upright.
You can find the difference between Pendulum-v0 and Pendulum-v1 in
this pull request.
MountainCar-v0, MountainCarContinuous-v0
gymnasium mountain_car source code and gymnasium mountain_car continuous source code
The agent (a car) is started at the bottom of a valley. For any given state the agent may choose to accelerate to the left, right or cease any acceleration.
Acrobot-v1
Acrobot is a 2-link pendulum with only the second joint actuated. Initially, both links point downwards. The goal is to swing the end-effector at a height at least the length of one link above the base. Both links can swing freely and can pass by each other, i.e., they don’t collide when they have the same angle.