ViZDoom
We use vizdoom==1.3.0 as the codebase. See
https://github.com/Farama-Foundation/ViZDoom/tree/1.3.0
Render Compare
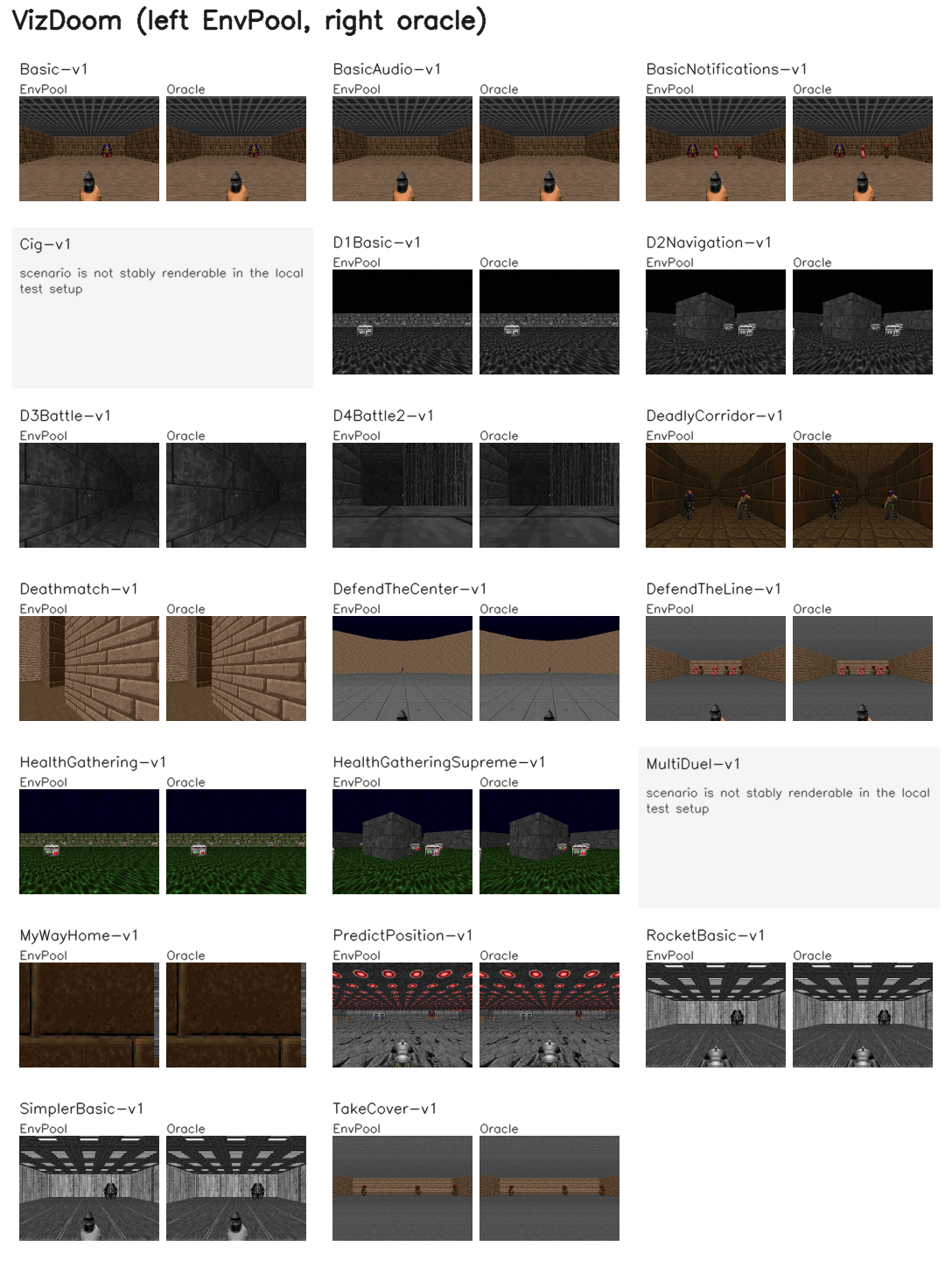
Representative first-frame compares for VizDoom tasks. In each panel, EnvPool is on the left and the exact screen-buffer oracle used by the test suite is on the right. Scenarios that cannot be rendered stably in the current local test setup are shown as placeholders.
Env Wrappers
Currently it includes these wrappers: frame-skip / episodic-life /
action-repeat / image-resize / reward-config.
Options
task_id (str): see available tasks below;num_envs (int): how many environments you would like to create;batch_size (int): the expected batch size for return result, default tonum_envs;num_threads (int): the maximum thread number for executing the actualenv.step, default tobatch_size;seed (int | Sequence[int]): the environment seed. When a sequence is provided, it must contain exactly one seed per environment. Default to42;max_episode_steps (int): the maximum number of steps for one episode, default to525;img_height (int): the desired observation image height, default to84;img_width (int): the desired observation image width, default to84;stack_num (int): the number of frames to stack for a single observation, default to4;frame_skip (int): the number of frames to execute one repeated action, only the last frame would be kept, default to4;use_inter_area_resize (bool): whether to usecv::INTER_AREAfor image resize, default toTrue;episodic_life (bool): make end-of-life == end-of-episode, but only reset on true game over. It helps the value estimation. Default toFalse;use_combined_action (bool): whether to use a discrete action space as action input (for doom game engine), see Action Space, default toFalse(use raw action space);force_speed (bool): ifSPEEDbutton is available, press it in every frame. Only available when using combined action. Default toFalse;lmp_save_dir (str): the directory to save.lmpfiles for recording and replay (see tests/vizdoom/replay.py), default to""(no lmp saving);vzd_path (str): the vizdoom binary path, default tovizdoom/bin/vizdoom;cfg_path (str): the.cfgfile path, used in customized env setup, default to"";wad_path (str): the.wadfile path, used in customized env setup, default to"";iwad_path (str): the rendering resource package path, default tovizdoom/bin/freedoom2;map_id (str): the vizdoom map id, see setDoomMap, available options are"map01", "map02", ..., default to"map01";game_args (str): the args string for vizdoom game, see addGameArgs, default to"";reward_config (Dict[str, Tuple[float, float]]): how to calculate the reward (see below), default to{"FRAGCOUNT": [1, -1.5], "KILLCOUNT": [1, 0], "DEATHCOUNT": [-0.75, 0.75], "HITCOUNT": [0.01, -0.01], "DAMAGECOUNT": [0.003, -0.003], "HEALTH": [0.005, -0.003], "ARMOR": [0.005, -0.001], "AMMO2": [0.0002, -0.0001]};
The original vizdoom env calculates reward with only living reward and death
penalty. Our preliminary result shows these two reward have negative effect on
agent training. Instead, other reward related to some game variable is very
useful. You can pass various reward config into vizdoom env. Each item in this
dictionary has format of NAME: [pos_reward, neg_reward]. If we take
HEALTH: [pos_health, neg_health] as an example:
delta = current[HEALTH] - last[HEALTH]
if delta >= 0:
reward += delta * pos_health
else:
reward -= delta * neg_health
where last[*] is the corresponding value at the last timestep.
weapon_durationsee below, default to5;selected_weapon_reward_config (Dict[int, float]): the available keys are2 / 3 / ... / 7, it means if the agent holdsi``th weapon for at least ``weapon_durationtimestep, the reward will be added byselected_weapon_reward_config[i];delta_button_config (Dict[str, Tuple[int, float, float]]): see Action Space.
Customized VizDoom Env
Use VizdoomCustom-v1 with cfg_path and wad_path:
env = envpool.make(
"VizdoomCustom-v1",
cfg_path="xxx.cfg",
wad_path="xxx.wad",
...
)
Observation Space
The observation channel number is defined in configuration file (e.g.,
GRAY8 or CRCGCB).
The game variables defined in configuration file are in observation (dm) / are
in info (gym). Each variable tags a key. Currently it includes:
"AMMO2", "AMMO3", "AMMO4", "AMMO5", "AMMO6", "AMMO7", "ARMOR",
"DAMAGECOUNT", "DEATHCOUNT", "FRAGCOUNT", "HEALTH", "HITCOUNT",
"KILLCOUNT", "SELECTED_WEAPON", "SELECTED_WEAPON_AMMO", "USER2"
Action Space
If use_combined_action is set to False, it only accepts the original
action input (which is a list of float); otherwise:
All of the buttons are in discrete space, including delta button. In EnvPool we directly generate the combo action with the following rule:
Each time the agent can only select at most one weapon
can only select at most one of
SELECT_WEAPON0…SELECT_WEAPON9buttons
Some buttons are pair-wised, they cannot be selected together (
FF, TF, FT)MOVE_LEFTandMOVE_RIGHT,MOVE_FORWARDandMOVE_BACKWARD,TURN_LEFTandTURN_RIGHT,LOOK_UPandLOOK_DOWN,MOVE_UPandMOVE_DOWN,SELECT_PREV_WEAPONandSELECT_NEXT_WEAPON,SELECT_PREV_ITEMandSELECT_NEXT_ITEM
Other non-delta buttons have two choices:
ForTFor delta buttons, the given
delta_button_configspecifies how it builds the action set (with format[num, min, max]). For example, if we passdelta_button_config={"TURN_LEFT_RIGHT_DELTA": [4, -2.0, 1.0]}, it will buildTURN_LEFT_RIGHT_DELTA = [-2.0, -1.0, 0.0, 1.0]4 discrete choices.
For example, if we have MOVE_FORWARD, TURN_LEFT and TURN_RIGHT
three buttons (which is exactly health-gathering setting), we have 2x3=6
discrete actions according the above rule.
Available Tasks
Basic-v1Cig-v1D1Basic-v1D2Navigation-v1D3Battle-v1D4Battle2-v1DeadlyCorridor-v1Deathmatch-v1DefendTheCenter-v1DefendTheLine-v1HealthGathering-v1HealthGatheringSupreme-v1MultiDuel-v1MyWayHome-v1PredictPosition-v1RocketBasic-v1SimplerBasic-v1TakeCover-v1VizdoomCustom-v1