Gymnasium-Robotics
EnvPool provides native C++ implementations for the Gymnasium-Robotics Fetch,
Shadow Hand, Adroit, PointMaze, and FrankaKitchen task families. The Python
package exposes the same make_dm, make_gym, and make_gymnasium
entry points as other EnvPool environments, including batched sync and async
stepping.
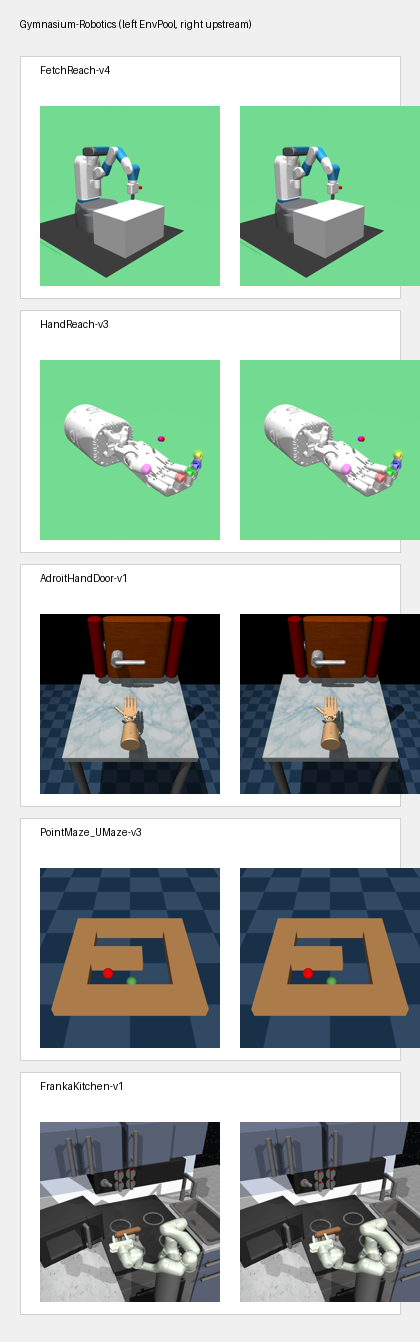
Render Compare
Representative first-frame compares for Gymnasium-Robotics tasks that support rendering. In each panel, EnvPool is on the left and the official Gymnasium-Robotics reference renderer is on the right.
Supported Tasks
EnvPool mirrors Adroit, Fetch, Shadow Hand manipulation/reach, PointMaze, and
FrankaKitchen task IDs from Gymnasium-Robotics. Legacy MuJoCo *-v2 IDs such
as Ant-v2 and HalfCheetah-v2 are intentionally not registered, because
EnvPool already provides the corresponding native MuJoCo
*-v3/*-v4/*-v5 tasks.
For legacy Gymnasium-Robotics IDs that still point to the deprecated
mujoco_py backend upstream, EnvPool transparently routes to the modern
MuJoCo equivalents:
Fetch*v1IDs use the correspondingv4tasks.HandManipulate*v0IDs use the correspondingv1tasks.HandReach-v0andHandReachDense-v0use the correspondingv3tasks.
Registered Task IDs
Fetch
FetchReach-v1
FetchReach-v4
FetchReachDense-v1
FetchReachDense-v4
FetchPush-v1
FetchPush-v4
FetchPushDense-v1
FetchPushDense-v4
FetchPickAndPlace-v1
FetchPickAndPlace-v4
FetchPickAndPlaceDense-v1
FetchPickAndPlaceDense-v4
FetchSlide-v1
FetchSlide-v4
FetchSlideDense-v1
FetchSlideDense-v4
Shadow Hand
HandReach-v0
HandReach-v3
HandReachDense-v0
HandReachDense-v3
HandManipulateBlock-v0
HandManipulateBlock-v1
HandManipulateBlockDense-v0
HandManipulateBlockDense-v1
HandManipulateBlockFull-v0
HandManipulateBlockFull-v1
HandManipulateBlockFullDense-v0
HandManipulateBlockFullDense-v1
HandManipulateBlockRotateParallel-v0
HandManipulateBlockRotateParallel-v1
HandManipulateBlockRotateParallelDense-v0
HandManipulateBlockRotateParallelDense-v1
HandManipulateBlockRotateXYZ-v0
HandManipulateBlockRotateXYZ-v1
HandManipulateBlockRotateXYZDense-v0
HandManipulateBlockRotateXYZDense-v1
HandManipulateBlockRotateZ-v0
HandManipulateBlockRotateZ-v1
HandManipulateBlockRotateZDense-v0
HandManipulateBlockRotateZDense-v1
HandManipulateBlock_BooleanTouchSensors-v0
HandManipulateBlock_BooleanTouchSensors-v1
HandManipulateBlock_BooleanTouchSensorsDense-v0
HandManipulateBlock_BooleanTouchSensorsDense-v1
HandManipulateBlock_ContinuousTouchSensors-v0
HandManipulateBlock_ContinuousTouchSensors-v1
HandManipulateBlock_ContinuousTouchSensorsDense-v0
HandManipulateBlock_ContinuousTouchSensorsDense-v1
HandManipulateBlockRotateParallel_BooleanTouchSensors-v0
HandManipulateBlockRotateParallel_BooleanTouchSensors-v1
HandManipulateBlockRotateParallel_BooleanTouchSensorsDense-v0
HandManipulateBlockRotateParallel_BooleanTouchSensorsDense-v1
HandManipulateBlockRotateParallel_ContinuousTouchSensors-v0
HandManipulateBlockRotateParallel_ContinuousTouchSensors-v1
HandManipulateBlockRotateParallel_ContinuousTouchSensorsDense-v0
HandManipulateBlockRotateParallel_ContinuousTouchSensorsDense-v1
HandManipulateBlockRotateXYZ_BooleanTouchSensors-v0
HandManipulateBlockRotateXYZ_BooleanTouchSensors-v1
HandManipulateBlockRotateXYZ_BooleanTouchSensorsDense-v0
HandManipulateBlockRotateXYZ_BooleanTouchSensorsDense-v1
HandManipulateBlockRotateXYZ_ContinuousTouchSensors-v0
HandManipulateBlockRotateXYZ_ContinuousTouchSensors-v1
HandManipulateBlockRotateXYZ_ContinuousTouchSensorsDense-v0
HandManipulateBlockRotateXYZ_ContinuousTouchSensorsDense-v1
HandManipulateBlockRotateZ_BooleanTouchSensors-v0
HandManipulateBlockRotateZ_BooleanTouchSensors-v1
HandManipulateBlockRotateZ_BooleanTouchSensorsDense-v0
HandManipulateBlockRotateZ_BooleanTouchSensorsDense-v1
HandManipulateBlockRotateZ_ContinuousTouchSensors-v0
HandManipulateBlockRotateZ_ContinuousTouchSensors-v1
HandManipulateBlockRotateZ_ContinuousTouchSensorsDense-v0
HandManipulateBlockRotateZ_ContinuousTouchSensorsDense-v1
HandManipulateEgg-v0
HandManipulateEgg-v1
HandManipulateEggDense-v0
HandManipulateEggDense-v1
HandManipulateEggFull-v0
HandManipulateEggFull-v1
HandManipulateEggFullDense-v0
HandManipulateEggFullDense-v1
HandManipulateEggRotate-v0
HandManipulateEggRotate-v1
HandManipulateEggRotateDense-v0
HandManipulateEggRotateDense-v1
HandManipulateEgg_BooleanTouchSensors-v0
HandManipulateEgg_BooleanTouchSensors-v1
HandManipulateEgg_BooleanTouchSensorsDense-v0
HandManipulateEgg_BooleanTouchSensorsDense-v1
HandManipulateEgg_ContinuousTouchSensors-v0
HandManipulateEgg_ContinuousTouchSensors-v1
HandManipulateEgg_ContinuousTouchSensorsDense-v0
HandManipulateEgg_ContinuousTouchSensorsDense-v1
HandManipulateEggRotate_BooleanTouchSensors-v0
HandManipulateEggRotate_BooleanTouchSensors-v1
HandManipulateEggRotate_BooleanTouchSensorsDense-v0
HandManipulateEggRotate_BooleanTouchSensorsDense-v1
HandManipulateEggRotate_ContinuousTouchSensors-v0
HandManipulateEggRotate_ContinuousTouchSensors-v1
HandManipulateEggRotate_ContinuousTouchSensorsDense-v0
HandManipulateEggRotate_ContinuousTouchSensorsDense-v1
HandManipulatePen-v0
HandManipulatePen-v1
HandManipulatePenDense-v0
HandManipulatePenDense-v1
HandManipulatePenFull-v0
HandManipulatePenFull-v1
HandManipulatePenFullDense-v0
HandManipulatePenFullDense-v1
HandManipulatePenRotate-v0
HandManipulatePenRotate-v1
HandManipulatePenRotateDense-v0
HandManipulatePenRotateDense-v1
HandManipulatePen_BooleanTouchSensors-v0
HandManipulatePen_BooleanTouchSensors-v1
HandManipulatePen_BooleanTouchSensorsDense-v0
HandManipulatePen_BooleanTouchSensorsDense-v1
HandManipulatePen_ContinuousTouchSensors-v0
HandManipulatePen_ContinuousTouchSensors-v1
HandManipulatePen_ContinuousTouchSensorsDense-v0
HandManipulatePen_ContinuousTouchSensorsDense-v1
HandManipulatePenRotate_BooleanTouchSensors-v0
HandManipulatePenRotate_BooleanTouchSensors-v1
HandManipulatePenRotate_BooleanTouchSensorsDense-v0
HandManipulatePenRotate_BooleanTouchSensorsDense-v1
HandManipulatePenRotate_ContinuousTouchSensors-v0
HandManipulatePenRotate_ContinuousTouchSensors-v1
HandManipulatePenRotate_ContinuousTouchSensorsDense-v0
HandManipulatePenRotate_ContinuousTouchSensorsDense-v1
Adroit
AdroitHandDoor-v1
AdroitHandDoorSparse-v1
AdroitHandHammer-v1
AdroitHandHammerSparse-v1
AdroitHandPen-v1
AdroitHandPenSparse-v1
AdroitHandRelocate-v1
AdroitHandRelocateSparse-v1
PointMaze
PointMaze_Open-v3
PointMaze_OpenDense-v3
PointMaze_UMaze-v3
PointMaze_UMazeDense-v3
PointMaze_Medium-v3
PointMaze_MediumDense-v3
PointMaze_Large-v3
PointMaze_LargeDense-v3
PointMaze_Open_Diverse_G-v3
PointMaze_Open_Diverse_GDense-v3
PointMaze_Open_Diverse_GR-v3
PointMaze_Open_Diverse_GRDense-v3
PointMaze_Medium_Diverse_G-v3
PointMaze_Medium_Diverse_GDense-v3
PointMaze_Medium_Diverse_GR-v3
PointMaze_Medium_Diverse_GRDense-v3
PointMaze_Large_Diverse_G-v3
PointMaze_Large_Diverse_GDense-v3
PointMaze_Large_Diverse_GR-v3
PointMaze_Large_Diverse_GRDense-v3
Kitchen
FrankaKitchen-v1
Examples
import envpool
env = envpool.make_gymnasium("FetchReach-v4", num_envs=4, seed=0)
obs, info = env.reset()
obs, rew, term, trunc, info = env.step(env.action_space.sample()[None, :].repeat(4, axis=0))
frame = env.render()
env.close()
Notes
FrankaKitchen-v1 uses a fixed all-task observation schema in EnvPool so
that the C++ state specification remains static. The returned info values
for tasks_to_complete, step_task_completions, and
episode_task_completions are 7-dimensional masks ordered as
bottom burner, top burner, light switch, slide cabinet,
hinge cabinet, microwave, and kettle.