Highway
EnvPool supports the tasks registered by highway-env. The implementation is
native C++ inside EnvPool; it does not call back into the upstream Python
environment at runtime. highway-v0 and highway-fast-v0 use the aligned
straight-road C++ backend, and the remaining upstream IDs use native EnvPool
task backends with matching public observation/action spaces.
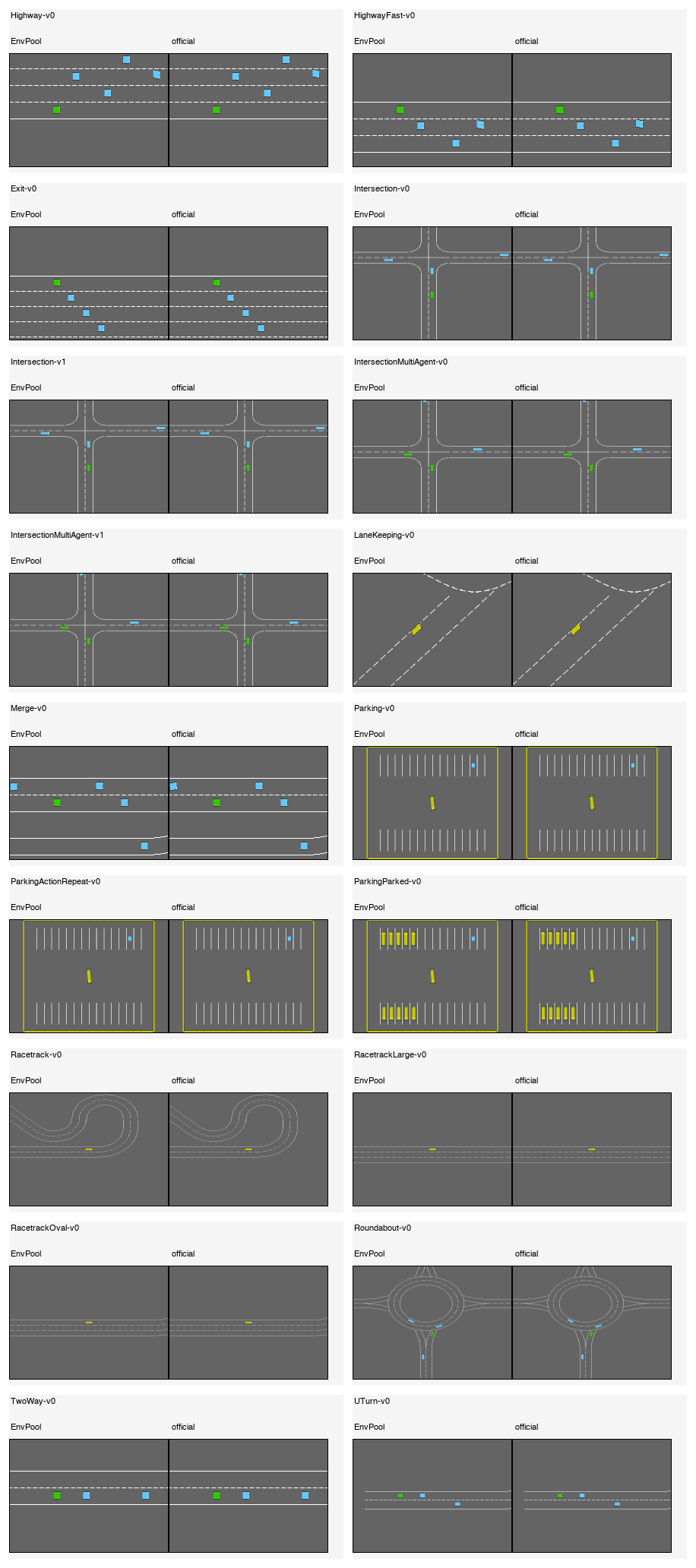
Render Compare
Representative render compares for all upstream Highway tasks after reset and
two idle/default actions.
Each panel shows EnvPool on the left and the official highway-env pygame
renderer on the right.
Options
task_id (str): any task listed in Available Tasks;num_envs (int): how many environments you would like to create;batch_size (int): the expected batch size for return result, default tonum_envs;num_threads (int): the maximum thread number for executing the actualenv.step, default tobatch_size;seed (int | Sequence[int]): the environment seed. When a sequence is provided, it must contain exactly one seed per environment. Default to42;
Highway-v0 and HighwayFast-v0 additionally expose these straight-road
options:
max_episode_steps (int): the maximum number of policy decisions in one episode.Highway-v0defaults to40andHighwayFast-v0defaults to30;lanes_count (int): number of parallel lanes, default to4;vehicles_count (int): number of traffic vehicles, default to50;observation_vehicles_count (int): number of rows in the kinematic observation, default to5;simulation_frequency (int): physics update frequency in Hertz, default to15;policy_frequency (int): agent action frequency in Hertz, default to1;initial_lane_id (int): fixed ego start lane, or-1for a random start lane;ego_spacing (float)andvehicles_density (float): initial traffic spacing controls;collision_reward (float),right_lane_reward (float),high_speed_reward (float),reward_speed_low (float),reward_speed_high (float), andnormalize_reward (bool): reward shaping options;offroad_terminal (bool): terminate when the ego vehicle leaves the road, default toFalse;screen_width (int),screen_height (int),centering_position_x (float),centering_position_y (float), andscaling (float): renderer camera options.
Observation Space
For Highway-v0 and HighwayFast-v0, the Gymnasium wrapper returns a
(observation_vehicles_count, 5) float array. Columns follow upstream’s
kinematic observation convention:
presence, x, y, vx, and vy. Coordinates are centered on the
ego vehicle and normalized to roughly [-1, 1].
These tasks also expose two info fields:
info["speed"]: ego vehicle speed in meters per second;info["crashed"]: whether the ego vehicle has crashed.
Action Space
For Highway-v0 and HighwayFast-v0, the action space is discrete with
five meta-actions:
0:LANE_LEFT1:IDLE2:LANE_RIGHT3:FASTER4:SLOWER
Available Tasks
Highway-v0; alias:highway-v0HighwayFast-v0; alias:highway-fast-v0Exit-v0; alias:exit-v0Intersection-v0; alias:intersection-v0Intersection-v1; alias:intersection-v1IntersectionMultiAgent-v0; alias:intersection-multi-agent-v0IntersectionMultiAgent-v1; alias:intersection-multi-agent-v1LaneKeeping-v0; alias:lane-keeping-v0Merge-v0; alias:merge-v0Parking-v0; alias:parking-v0ParkingActionRepeat-v0; alias:parking-ActionRepeat-v0ParkingParked-v0; alias:parking-parked-v0Racetrack-v0; alias:racetrack-v0RacetrackLarge-v0; alias:racetrack-large-v0RacetrackOval-v0; alias:racetrack-oval-v0Roundabout-v0; alias:roundabout-v0TwoWay-v0; alias:two-way-v0UTurn-v0; alias:u-turn-v0
Correctness Tests
The test suite uses these pass standards:
Native straight-road rollout determinism: two EnvPool instances with the same seed and action sequence must match, while a different seed must change the rollout;
Full-task native determinism: every upstream registered ID is reset and stepped for multiple policy decisions in two same-seed EnvPool instances; observation trees, rewards, done flags, info trees, and renders must match bitwise;
Native controlled-vehicle alignment: no-traffic
Highway-v0andHighwayFast-v0observations are checked bitwise against officialhighway-envfor several road and policy-frequency setups. Rewards,terminated,truncated,info["speed"], andinfo["crashed"]are checked exactly at EnvPool’s exported dtype;Native render alignment: multi-step no-traffic RGB renders and representative reset traffic renders are checked bitwise against the official pygame renderer. Rendering must also be batched and state-invariant;
Full upstream registry coverage: the test pins the 18 registered upstream IDs, checks EnvPool’s Gymnasium observation/action spaces against an independent official
highway-envoracle, creates EnvPool through each upstream ID/alias, resets, steps more than once, and renders more than once;Implementation boundary: tests and doc tooling may import official
highway-envas an oracle, but the EnvPool implementation is built as C++ code and has no official Python-environment bridge.